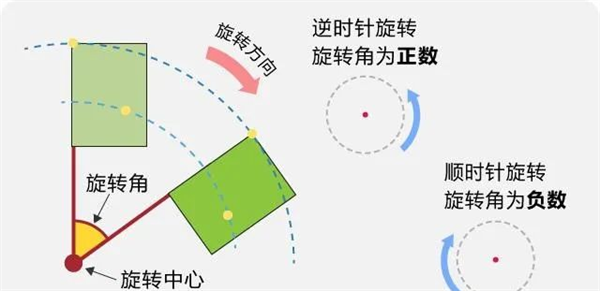
为什么需要用到旋转中心呢?
因为机器人或者机器轴吸取物料时,轴心和产品中心不一致,所以转θ角度后的位置需要旋转中心算出来。
但是必须要算旋转中心吗?其实理论上也可以不需要。
求旋转中心是为了实现:
求特征点绕旋转中心旋转theta角度后的位置,最后得出新的特征点坐标。
如果换一种想法, 如果已知特征点的坐标, 那么其实也可以把特征点当成旋转的位置,即机械轴绕特征点旋转。
因此可以总结如下:
(1)求旋转中心
先旋转theta实现角度平行,然后移动XY实现对位。
(2) 不求旋转中心
先移动XY, 再转角度。
该方法只是想了一个思路,暂未进行验证,有验证过的友友,可以评论一下哈。
计算公式
x=(x1-x2)cosθ-(y1-y2)sinθ+x2
y=(y1-y2)cosθ+(x1-x2)sinθ+y2
说明:
x2,y2为旋转中心,
x1,y1为Mark点坐标,
θ为旋转角度,
x,y为Mark点绕旋转中心旋转θ角度后的坐标。
计算方法
(1)采用多点拟合圆的方式计算得出。
(2)通过3组或者3组以上坐标算出。
(3)通过围绕一点旋转 180 度算出。
电话:15615862263

泽佳科技公众号扫一扫
关注最新资讯
